Bras robot UR10
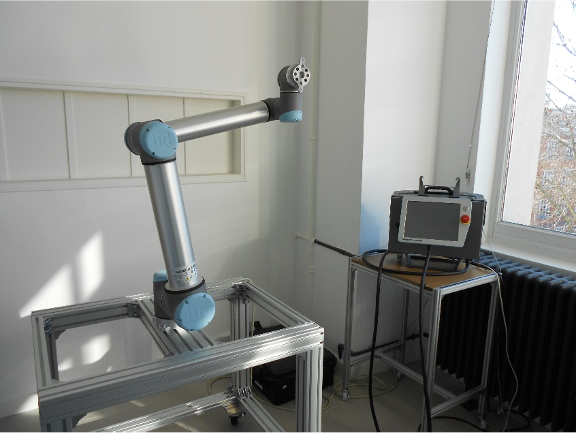 |
Modèle UR10
Applications : Déplacer un vibromètre laser 2D à des positions prédéfinies. |
Pour aller plus loin…
|
Modèle UR10
Applications : Déplacer un vibromètre laser 2D à des positions prédéfinies. |
ISAE-Supméca
Institut supérieur de mécanique de Paris
3 rue Fernand Hainaut
93407 Saint-Ouen CEDEX
Ministère de l’Enseignement supérieur et de la Recherche
01 49 45 29 00
www.isae-supmeca.fr