Ces systèmes sont des systèmes complexes, multi-domaines, multi-physiques, parfois critiques, pouvant être cyber-physiques, autonomes (drones, AMR, etc.) ou embarqués (actionneurs aéronautiques, etc.).
Les travaux de l’équipe sont organisés en 3 axes de recherche :
- Axe 1 : Systèmes Mécatroniques et Systèmes Cyber – Physiques
- Axe 2 : Systèmes Cyber – Physiques de Production et Systèmes productifs
- Axe 3 : Formalisation, modélisation, simulation et optimisation des systèmes complexes
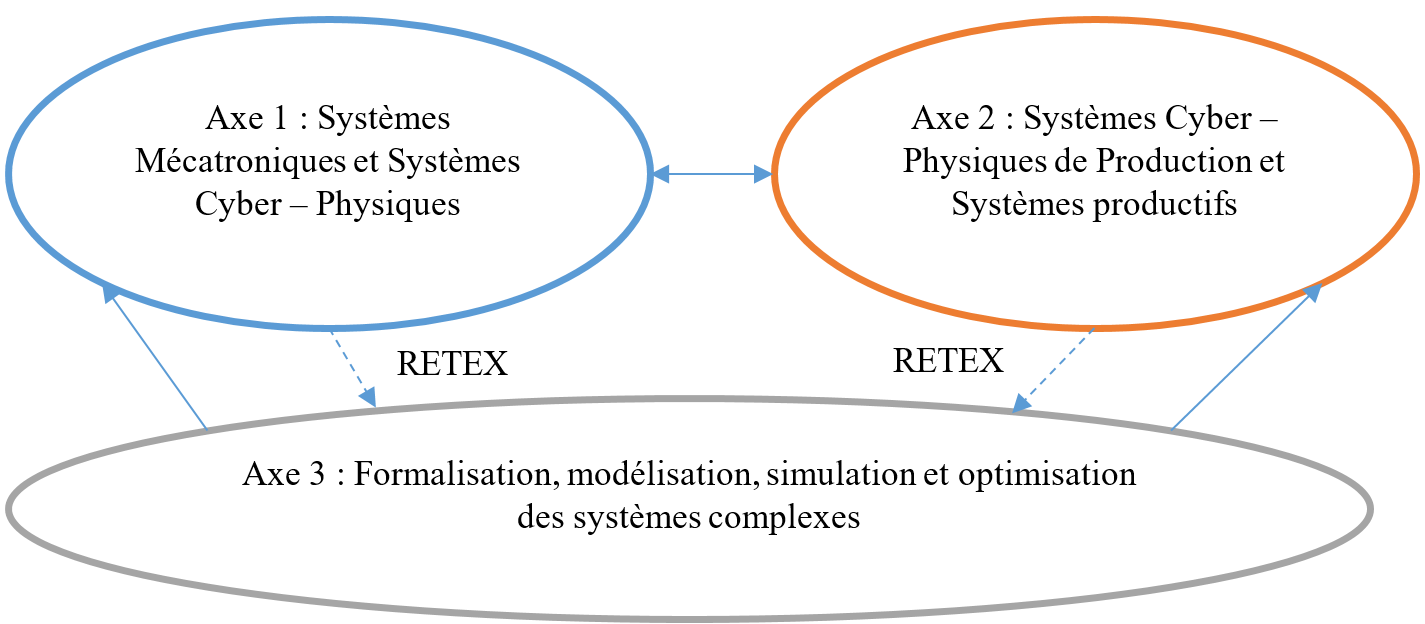
Dans le premier axe, nous traitons les problématiques associées à la gestion des exigences, des connaissances et de l’hétérogénéité et l’adaptation ou développement des méthodes et outils de conception et de développement, s’appuyant sur une démarche d’Ingénierie Système basée sur les modèles (MBSE: Model-Based System Engineering).
Les travaux de l’axe 2 s’intéressent spécifiquement aux systèmes Cyber – Physiques de Production et aux systèmes productifs modernes qui sont des systèmes de production intégrant des composants mécatroniques, devenant de plus en plus cyber-physiques et intégrant les humains. Nos activités dans cet axe s’inscrivent dans le cadre de l’Industrie 5.0 (Résilience, Humanocentrisme et Durabilité). En particulier, nous nous intéressons aux méthodes et outils permettant d’assurer la résilience et l’adaptation aux perturbations tout en conservant les performances du système, depuis le diagnostic des défauts qui ne peuvent pas l’être par expertise ou à l’aide d’un modèle physique, à l’intégration des nouvelles technologies (IoT, IA, FA, etc.) et à l’optimisation des processus et procédés de fabrication.
L’axe 3 soutient les activités des 2 premiers axes par des formalisations mathématiques, des modèles, des simulations et des optimisations. Les caractéristiques des systèmes étudiés (complexes, multiphysiques, multi-domaines, systèmes distribués, etc.) rendent difficiles l’obtention de modèles fiables, nécessitant ainsi des simulations et la détermination d’une solution optimale ou tout simplement acceptable. L’axe 3 adresse, entre autres, les problématiques liées à l’interopérabilité et la cohérence entre les modèles, la réduction des modèles pour faciliter leur exploitation, la modélisation et la simulation du comportement collectif de systèmes distribués et la génération de modèles multi-physiques à partir de données, ainsi que les approches mathématiques décrivant le comportement de ces systèmes complexes.

Des choix méthodologiques et d’orientation cadrent nos travaux :
- L’Ingénierie système basée sur les modèles (MBSE – Model-Based System Engineering) pour une approche système basée modèles pour mieux traiter l’aspect multi-domaines et multiphysiques de ces systèmes. Cette approche inclut également l’ingénierie des exigences et peut intégrer les méthodes agiles ;
- La modélisation et simulation multiphysiques pour évaluer certains comportements de ces systèmes, notamment en prédimensionnement ;
- Le MBSA (Model-Based Safety Assesment) pour la prise en compte au plus tôt de l’aspect sûreté de fonctionnement de ces systèmes souvent considérés comme critiques ;
- La prise en compte des aspects collaboratifs avec aide à la décision et optimisation éventuelle lors de la démarche de conception mécatronique ;
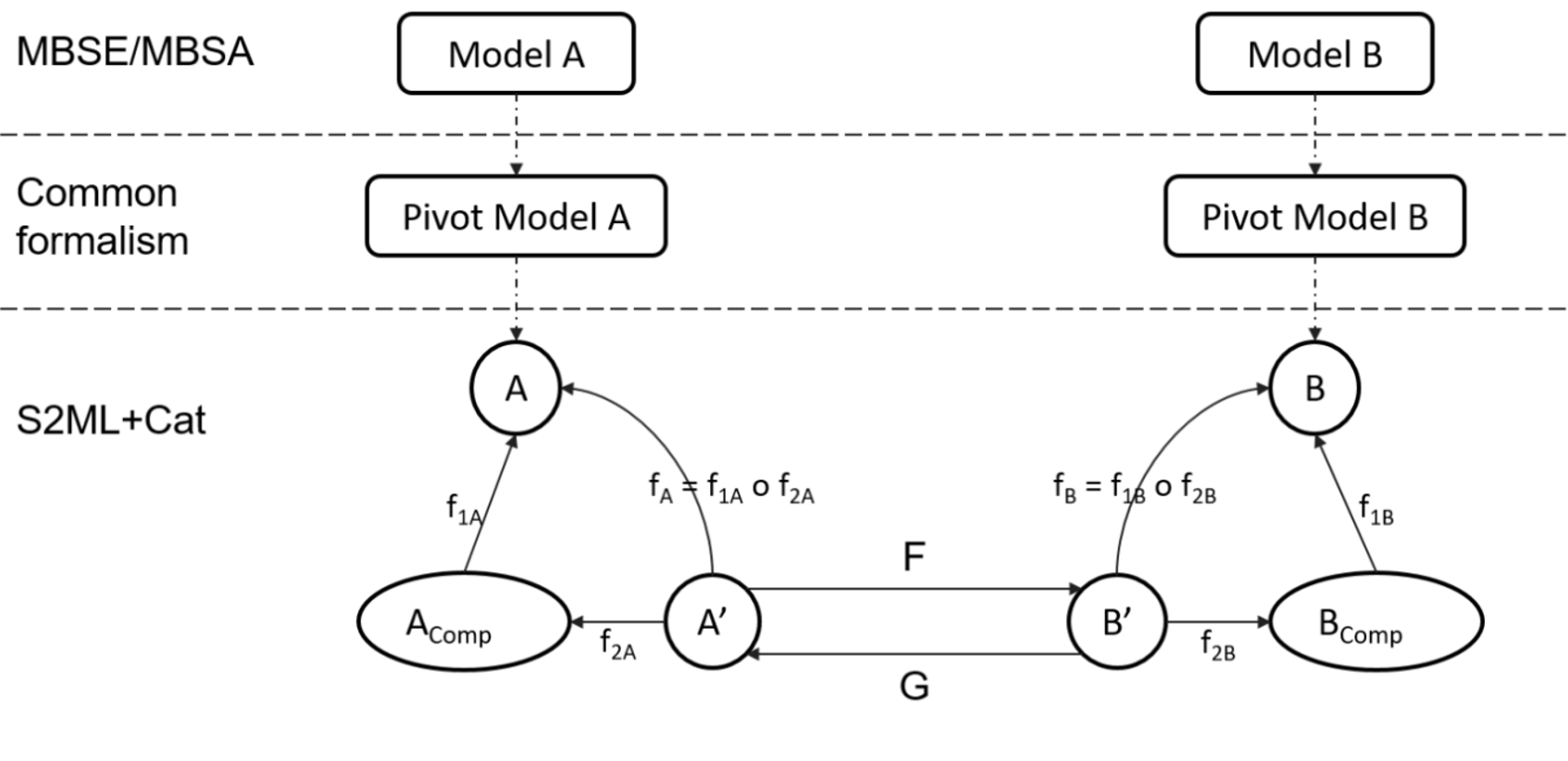
- L’utilisation des fondements théoriques et mathématiques : théorie des catégories, topologie, théorie des graphes, ontologie, optimisation multicritères, IA, etc ;
- La prise en compte des trois dimensions de la durabilité (économique/technique, environnementale et sociale).
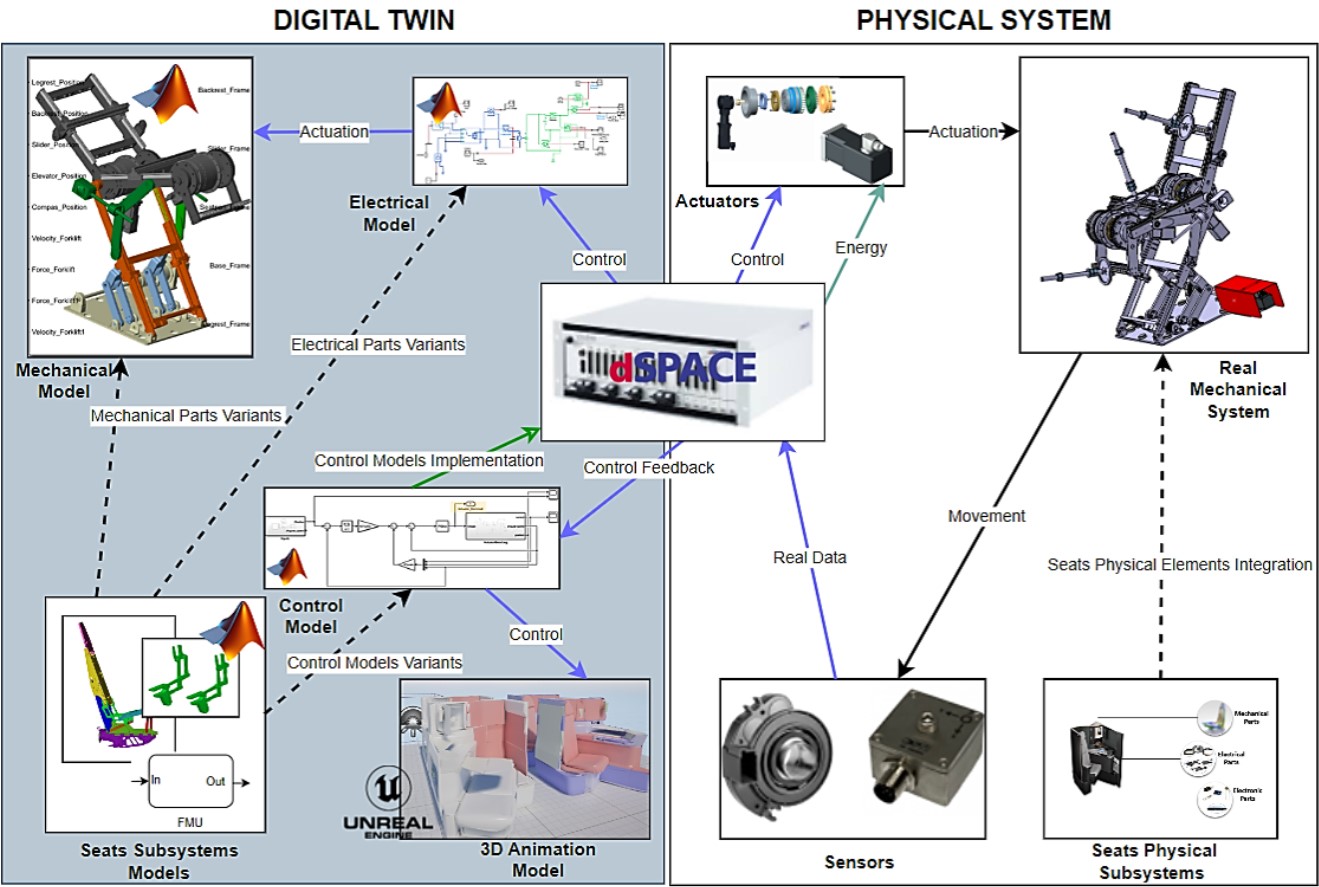
Adresser l’ensemble de ces axes autour de l’ingénierie (des) système(s) permet une intégration efficace et cohérente des modèles et simulations (MBSE, multiphysiques, MBSA, multi-métiers etc.), tant pour un produit mécatronique que pour un processus de production 4.0/5.0. Nos travaux scientifiques concourent à préserver une agilité méthodologique et une cohérence des modèles afin de jouer des scénarios fonctionnels et dysfonctionnels. Un de nos objectifs vise donc la définition, l’intégration et l’utilisation efficaces de jumeaux numériques pour mieux concevoir et exploiter le système en question.
Aborder la conception mécatronique par des théories telles que les catégories mathématiques ou en intégrant les préceptes de l’agilité est une prise de risque scientifique qui semble prometteuse avec les problématiques scientifiques et industrielles actuelles. Il en va de même pour le traitement du jumeau numérique intégrant MBSE et MBSA, en plus de la multiphysique, pour le comportement fonctionnel et dysfonctionnel.
Pour toutes ces activités, IS2M s’appuie sur des projets collaboratifs et des encadrements de thèses avec des organismes de recherche tels que l’IRT SystemX, des industriels tels que SAFRAN, THALES, EDF, DPS (Digital Product Simulation), PUIG (cosmétique), Nexteam (Industrie 4.0 pour l’aéronautique et le spatial), etc. et des académiques tels que UNINA (COGITO, Naples), FH Wels (Autriche), Ming Lab (UEC Tokyo), ENSAM Metz, ENIM (Monastir) et ENISo (Sousse) en Tunisie, etc.
Domaines d’application
Systèmes de transports (aéronautique, ferroviaire, automobile, naval), systèmes énergétiques, systèmes de production, systèmes médicaux, ainsi que les systèmes cyber-physiques (CPS) et les systèmes de systèmes (SoS).
Composition de l’équipe
Jean-Yves CHOLEY (Pr émérite), Romain DELABEYE (MCF), Thierno DIALLO (MCF), Stéphane DUGOWSON (MCF), Moncef HAMMADI (MCF HdR), Farid LOUNI (PRAG), Faïda MHENNI (MCF), Olivia PENAS (IGR HDR), Régis PLATEAUX (MCF), Thierry SORIANO (PU).
Doctorants
- AHRENDT Philipp – Co-direction ISAE-Supméca/Estaca (2023-2026)
- BLANC Grégoire – Nexteam (2024 – 2027)
- BOUHALI Imane – SAFRAN (2022 -2025)
- BOUZID Wafa – Cotutelle ISAE-Supméca et ENIM/Tunisie (2023 – 2026)
- CHAIEB Asma – Cotutelle ISAE-Supméca et ENISo/ Tunisie (2023 – 2026)
- CIAMPI Francesco Giuseppe – Co-direction ISAE-Supméca et UNINA
- ELTAIEF Aziza – Co-tutelle ISAE-Supméca et ENISo/ Tunisie (2024 – 2026)
- HENTATI Mohamed Rochdi – Cotutelle ISAE-Supméca et ENIS Sfax (2024 – 2027)
- SCHWEITZER Thibault – Co-direction ISAE-Supméca et Estaca (2022 – 2025)
- YOUSFI Larbi Cotutelle ISAE-Supméca et ENIS Sfax (2023 – 2026)
Pour les sujets, consultez la liste des thèses en cours
Responsable de l’équipe
Régis PLATEAUX
01 49 45 29 24
regis.plateaux@isae-supmeca.fr
Responsable adjoint de l’équipe
Thierno DIALLO
01 49 45 29 04
thierno.diallo@isae-supmeca.fr